Controle Mental Humano da Locomoção Contínua de Ciborgues Ratos com Interface Sem Fio de Cérebro para Cérebro
Controle Mental Humano da Locomoção Contínua de Ciborgues Ratos com Interface Sem Fio de Cérebro para Cérebro
Atualizado em
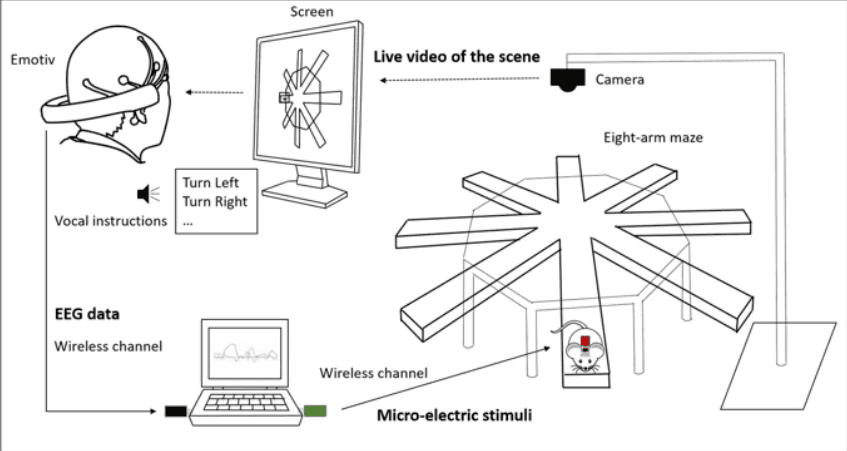
Shaomin Zhang, Sheng Yuan, Lipeng Huang, Xiaoxiang Zheng, Zhaohui Wu, Kedi Xu & Gang PanResumoInterfaces cérebro-máquina (BMIs) fornecem um canal de informação promissor entre o cérebro biológico e dispositivos externos, sendo aplicadas na construção do controle cérebro-dispositivo. Estudos anteriores exploraram a viabilidade de estabelecer uma interface cérebro-cérebro (BBI) entre vários cérebros por meio da combinação de BMIs. No entanto, usar BBI para realizar o controle multidegree eficiente de uma criatura viva, como um rato, para completar uma tarefa de navegação em um ambiente complexo ainda não foi demonstrado. Neste estudo, desenvolvemos uma BBI do cérebro humano para um rato implantado com microeletrodos (ou seja, cyborg rato), que integrou imagética motora baseada em eletroencefalograma e estimulação cerebral para realizar o controle da mente humana sobre a locomoção contínua do rato. Instruções de controle foram transferidas a partir de resultados de decodificação de imagética motora contínua com os modelos de controle propostos e foram enviadas sem fio ao cyborg rato por meio de estimulação elétrica cerebral micro. Os resultados mostraram que os cyborgs ratos puderam ser navegados suave e com sucesso pela mente humana para completar uma tarefa de navegação em um labirinto complexo. Nossos experimentos indicaram que a cooperação por meio da transmissão de informação multidimensional entre dois cérebros por BBI assistida por computador é promissora.Acesse o artigo aqui.
Shaomin Zhang, Sheng Yuan, Lipeng Huang, Xiaoxiang Zheng, Zhaohui Wu, Kedi Xu & Gang PanResumoInterfaces cérebro-máquina (BMIs) fornecem um canal de informação promissor entre o cérebro biológico e dispositivos externos, sendo aplicadas na construção do controle cérebro-dispositivo. Estudos anteriores exploraram a viabilidade de estabelecer uma interface cérebro-cérebro (BBI) entre vários cérebros por meio da combinação de BMIs. No entanto, usar BBI para realizar o controle multidegree eficiente de uma criatura viva, como um rato, para completar uma tarefa de navegação em um ambiente complexo ainda não foi demonstrado. Neste estudo, desenvolvemos uma BBI do cérebro humano para um rato implantado com microeletrodos (ou seja, cyborg rato), que integrou imagética motora baseada em eletroencefalograma e estimulação cerebral para realizar o controle da mente humana sobre a locomoção contínua do rato. Instruções de controle foram transferidas a partir de resultados de decodificação de imagética motora contínua com os modelos de controle propostos e foram enviadas sem fio ao cyborg rato por meio de estimulação elétrica cerebral micro. Os resultados mostraram que os cyborgs ratos puderam ser navegados suave e com sucesso pela mente humana para completar uma tarefa de navegação em um labirinto complexo. Nossos experimentos indicaram que a cooperação por meio da transmissão de informação multidimensional entre dois cérebros por BBI assistida por computador é promissora.Acesse o artigo aqui.
Shaomin Zhang, Sheng Yuan, Lipeng Huang, Xiaoxiang Zheng, Zhaohui Wu, Kedi Xu & Gang PanResumoInterfaces cérebro-máquina (BMIs) fornecem um canal de informação promissor entre o cérebro biológico e dispositivos externos, sendo aplicadas na construção do controle cérebro-dispositivo. Estudos anteriores exploraram a viabilidade de estabelecer uma interface cérebro-cérebro (BBI) entre vários cérebros por meio da combinação de BMIs. No entanto, usar BBI para realizar o controle multidegree eficiente de uma criatura viva, como um rato, para completar uma tarefa de navegação em um ambiente complexo ainda não foi demonstrado. Neste estudo, desenvolvemos uma BBI do cérebro humano para um rato implantado com microeletrodos (ou seja, cyborg rato), que integrou imagética motora baseada em eletroencefalograma e estimulação cerebral para realizar o controle da mente humana sobre a locomoção contínua do rato. Instruções de controle foram transferidas a partir de resultados de decodificação de imagética motora contínua com os modelos de controle propostos e foram enviadas sem fio ao cyborg rato por meio de estimulação elétrica cerebral micro. Os resultados mostraram que os cyborgs ratos puderam ser navegados suave e com sucesso pela mente humana para completar uma tarefa de navegação em um labirinto complexo. Nossos experimentos indicaram que a cooperação por meio da transmissão de informação multidimensional entre dois cérebros por BBI assistida por computador é promissora.Acesse o artigo aqui.