การควบคุมจิตใจมนุษย์ต่อความเคลื่อนไหวของไซบอร์กรูปหนูอย่างต่อเนื่องด้วยอินเตอร์เฟซสมองถึงสมองแบบไร้สาย
การควบคุมจิตใจมนุษย์ต่อความเคลื่อนไหวของไซบอร์กรูปหนูอย่างต่อเนื่องด้วยอินเตอร์เฟซสมองถึงสมองแบบไร้สาย
อัปเดตเมื่อ
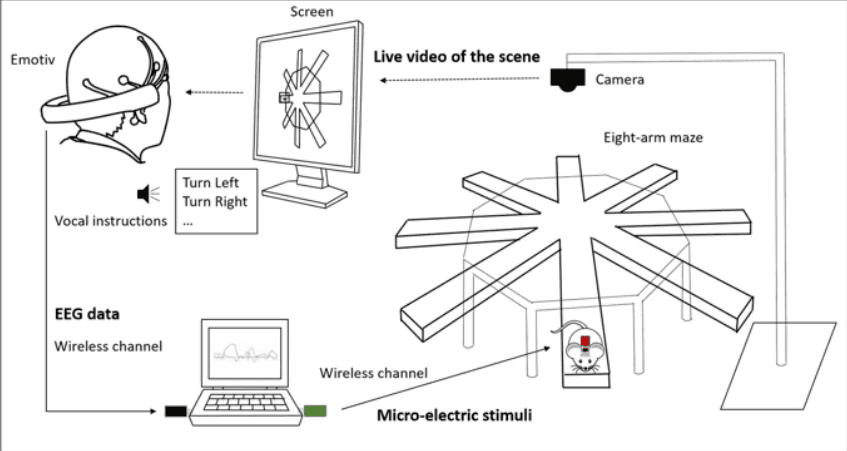
Shaomin Zhang, Sheng Yuan, Lipeng Huang, Xiaoxiang Zheng, Zhaohui Wu, Kedi Xu & Gang Panบทคัดย่ออินเทอร์เฟซระหว่างสมองกับเครื่องจักร (BMIs) เป็นช่องทางข้อมูลที่มีแนวโน้มดีระหว่างสมองทางชีวภาพและอุปกรณ์ภายนอกและถูกใช้ในการสร้างการควบคุมจากสมองไปยังอุปกรณ์ การศึกษาก่อนหน้านี้ได้สำรวจความเป็นไปได้ในการสร้างอินเทอร์เฟซระหว่างสมองถึงสมอง (BBI) ระหว่างสมองต่างๆ ผ่านการรวม BMIs อย่างไรก็ตาม การใช้ BBI เพื่อให้สามารถควบคุมหลากหลายมิติของสิ่งมีชีวิต เช่น หนู เพื่อทำภารกิจการนำทางในสภาพแวดล้อมที่ซับซ้อนไม่เคยถูกแสดงมาก่อน ในการศึกษานี้ เราได้พัฒนา BBI จากสมองมนุษย์ไปยังหนูที่ฝังด้วยไมโครอิเล็กโทรด (หรือที่เรียกว่าหนูไซบอร์ก) ซึ่งผสานการสร้างภาพเคลื่อนไหวของมอเตอร์ด้วยคลื่นสมองและการกระตุ้นสมองเพื่อให้การควบคุมด้วยความคิดมนุษย์ต่อการเคลื่อนไหวต่อเนื่องของหนู คำสั่งควบคุมถูกถ่ายทอดจากผลการถอดรหัสการสร้างภาพเคลื่อนไหวของมอเตอร์ด้วยการทำงานร่วมกันของแบบจำลองการควบคุมที่เสนอและส่งไปยังหนูไซบอร์กแบบไร้สายผ่านการกระตุ้นด้วยไมโครอิเล็กโทรทางสมอง ผลการทดลองแสดงให้เห็นว่าหนูไซบอร์กสามารถถูกนำทางอย่างราบรื่นและสำเร็จตามความคิดมนุษย์เพื่อทำภารกิจการนำทางในเขาวงกตที่ซับซ้อน การทดลองของเราบ่งชี้ว่าความร่วมมือผ่านการถ่ายทอดข้อมูลหลากหลายมิติระหว่างสองสมองโดย BBI ที่ช่วยด้วยคอมพิวเตอร์น่าจะเป็นไปได้เข้าถึงบทความได้ที่นี่
Shaomin Zhang, Sheng Yuan, Lipeng Huang, Xiaoxiang Zheng, Zhaohui Wu, Kedi Xu & Gang Panบทคัดย่ออินเทอร์เฟซระหว่างสมองกับเครื่องจักร (BMIs) เป็นช่องทางข้อมูลที่มีแนวโน้มดีระหว่างสมองทางชีวภาพและอุปกรณ์ภายนอกและถูกใช้ในการสร้างการควบคุมจากสมองไปยังอุปกรณ์ การศึกษาก่อนหน้านี้ได้สำรวจความเป็นไปได้ในการสร้างอินเทอร์เฟซระหว่างสมองถึงสมอง (BBI) ระหว่างสมองต่างๆ ผ่านการรวม BMIs อย่างไรก็ตาม การใช้ BBI เพื่อให้สามารถควบคุมหลากหลายมิติของสิ่งมีชีวิต เช่น หนู เพื่อทำภารกิจการนำทางในสภาพแวดล้อมที่ซับซ้อนไม่เคยถูกแสดงมาก่อน ในการศึกษานี้ เราได้พัฒนา BBI จากสมองมนุษย์ไปยังหนูที่ฝังด้วยไมโครอิเล็กโทรด (หรือที่เรียกว่าหนูไซบอร์ก) ซึ่งผสานการสร้างภาพเคลื่อนไหวของมอเตอร์ด้วยคลื่นสมองและการกระตุ้นสมองเพื่อให้การควบคุมด้วยความคิดมนุษย์ต่อการเคลื่อนไหวต่อเนื่องของหนู คำสั่งควบคุมถูกถ่ายทอดจากผลการถอดรหัสการสร้างภาพเคลื่อนไหวของมอเตอร์ด้วยการทำงานร่วมกันของแบบจำลองการควบคุมที่เสนอและส่งไปยังหนูไซบอร์กแบบไร้สายผ่านการกระตุ้นด้วยไมโครอิเล็กโทรทางสมอง ผลการทดลองแสดงให้เห็นว่าหนูไซบอร์กสามารถถูกนำทางอย่างราบรื่นและสำเร็จตามความคิดมนุษย์เพื่อทำภารกิจการนำทางในเขาวงกตที่ซับซ้อน การทดลองของเราบ่งชี้ว่าความร่วมมือผ่านการถ่ายทอดข้อมูลหลากหลายมิติระหว่างสองสมองโดย BBI ที่ช่วยด้วยคอมพิวเตอร์น่าจะเป็นไปได้เข้าถึงบทความได้ที่นี่
Shaomin Zhang, Sheng Yuan, Lipeng Huang, Xiaoxiang Zheng, Zhaohui Wu, Kedi Xu & Gang Panบทคัดย่ออินเทอร์เฟซระหว่างสมองกับเครื่องจักร (BMIs) เป็นช่องทางข้อมูลที่มีแนวโน้มดีระหว่างสมองทางชีวภาพและอุปกรณ์ภายนอกและถูกใช้ในการสร้างการควบคุมจากสมองไปยังอุปกรณ์ การศึกษาก่อนหน้านี้ได้สำรวจความเป็นไปได้ในการสร้างอินเทอร์เฟซระหว่างสมองถึงสมอง (BBI) ระหว่างสมองต่างๆ ผ่านการรวม BMIs อย่างไรก็ตาม การใช้ BBI เพื่อให้สามารถควบคุมหลากหลายมิติของสิ่งมีชีวิต เช่น หนู เพื่อทำภารกิจการนำทางในสภาพแวดล้อมที่ซับซ้อนไม่เคยถูกแสดงมาก่อน ในการศึกษานี้ เราได้พัฒนา BBI จากสมองมนุษย์ไปยังหนูที่ฝังด้วยไมโครอิเล็กโทรด (หรือที่เรียกว่าหนูไซบอร์ก) ซึ่งผสานการสร้างภาพเคลื่อนไหวของมอเตอร์ด้วยคลื่นสมองและการกระตุ้นสมองเพื่อให้การควบคุมด้วยความคิดมนุษย์ต่อการเคลื่อนไหวต่อเนื่องของหนู คำสั่งควบคุมถูกถ่ายทอดจากผลการถอดรหัสการสร้างภาพเคลื่อนไหวของมอเตอร์ด้วยการทำงานร่วมกันของแบบจำลองการควบคุมที่เสนอและส่งไปยังหนูไซบอร์กแบบไร้สายผ่านการกระตุ้นด้วยไมโครอิเล็กโทรทางสมอง ผลการทดลองแสดงให้เห็นว่าหนูไซบอร์กสามารถถูกนำทางอย่างราบรื่นและสำเร็จตามความคิดมนุษย์เพื่อทำภารกิจการนำทางในเขาวงกตที่ซับซ้อน การทดลองของเราบ่งชี้ว่าความร่วมมือผ่านการถ่ายทอดข้อมูลหลากหลายมิติระหว่างสองสมองโดย BBI ที่ช่วยด้วยคอมพิวเตอร์น่าจะเป็นไปได้เข้าถึงบทความได้ที่นี่
