無線脳-to-脳インターフェースによるラットサイボーグの連続的な運動の人間の思考コントロール
無線脳-to-脳インターフェースによるラットサイボーグの連続的な運動の人間の思考コントロール
更新日
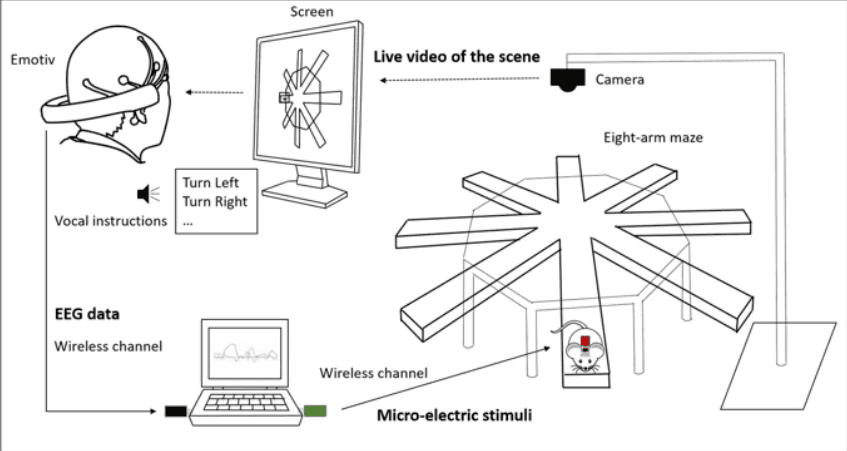
シャオミン・ザン、シェン・ユアン、リペン・ホアン、シャオシャン・ジェン、ザオフイ・ウー、ケディ・シュー&ガン・パン要約脳-機械インターフェース(BMI)は、生物学的脳と外部デバイスとの間の有望な情報チャネルを提供し、脳からデバイスへの制御の構築に適用されています。以前の研究では、BMIの組み合わせを通じて、さまざまな脳の間で脳-脳インターフェース(BBI)の確立可能性が探求されてきました。しかし、BBIを使用して、ラットなどの生物の効率的な多次元制御を実現することが、複雑な環境でのナビゲーションタスクを完了するためにはまだ示されていません。今回の研究では、マイクロ電極を植えたラット(すなわち、ラットサイボーグ)に対して人間の脳からBBIを開発し、脳波に基づく運動イメージと脳刺激を統合して、人間の意識によるラットの連続的な運動制御を実現しました。制御指示は、提案された制御モデルの継続的な運動イメージのデコーディング結果から転送され、脳のマイクロ電気刺激を通じてラットサイボーグに無線送信されました。結果は、ラットサイボーグが人間の意識によって複雑な迷路でナビゲーションタスクをスムーズかつ成功裏に完了できることを示しました。我々の実験は、コンピュータ支援のBBIによって2つの脳間で多次元情報を送信することによる協力が有望であることを示しています。この記事にアクセスしてください。
シャオミン・ザン、シェン・ユアン、リペン・ホアン、シャオシャン・ジェン、ザオフイ・ウー、ケディ・シュー&ガン・パン要約脳-機械インターフェース(BMI)は、生物学的脳と外部デバイスとの間の有望な情報チャネルを提供し、脳からデバイスへの制御の構築に適用されています。以前の研究では、BMIの組み合わせを通じて、さまざまな脳の間で脳-脳インターフェース(BBI)の確立可能性が探求されてきました。しかし、BBIを使用して、ラットなどの生物の効率的な多次元制御を実現することが、複雑な環境でのナビゲーションタスクを完了するためにはまだ示されていません。今回の研究では、マイクロ電極を植えたラット(すなわち、ラットサイボーグ)に対して人間の脳からBBIを開発し、脳波に基づく運動イメージと脳刺激を統合して、人間の意識によるラットの連続的な運動制御を実現しました。制御指示は、提案された制御モデルの継続的な運動イメージのデコーディング結果から転送され、脳のマイクロ電気刺激を通じてラットサイボーグに無線送信されました。結果は、ラットサイボーグが人間の意識によって複雑な迷路でナビゲーションタスクをスムーズかつ成功裏に完了できることを示しました。我々の実験は、コンピュータ支援のBBIによって2つの脳間で多次元情報を送信することによる協力が有望であることを示しています。この記事にアクセスしてください。
シャオミン・ザン、シェン・ユアン、リペン・ホアン、シャオシャン・ジェン、ザオフイ・ウー、ケディ・シュー&ガン・パン要約脳-機械インターフェース(BMI)は、生物学的脳と外部デバイスとの間の有望な情報チャネルを提供し、脳からデバイスへの制御の構築に適用されています。以前の研究では、BMIの組み合わせを通じて、さまざまな脳の間で脳-脳インターフェース(BBI)の確立可能性が探求されてきました。しかし、BBIを使用して、ラットなどの生物の効率的な多次元制御を実現することが、複雑な環境でのナビゲーションタスクを完了するためにはまだ示されていません。今回の研究では、マイクロ電極を植えたラット(すなわち、ラットサイボーグ)に対して人間の脳からBBIを開発し、脳波に基づく運動イメージと脳刺激を統合して、人間の意識によるラットの連続的な運動制御を実現しました。制御指示は、提案された制御モデルの継続的な運動イメージのデコーディング結果から転送され、脳のマイクロ電気刺激を通じてラットサイボーグに無線送信されました。結果は、ラットサイボーグが人間の意識によって複雑な迷路でナビゲーションタスクをスムーズかつ成功裏に完了できることを示しました。我々の実験は、コンピュータ支援のBBIによって2つの脳間で多次元情報を送信することによる協力が有望であることを示しています。この記事にアクセスしてください。