کنترل ذهن انسان بر روی حرکات مداوم سایبورگ موش با رابط بیسیم مغز به مغز
کنترل ذهن انسان بر روی حرکات مداوم سایبورگ موش با رابط بیسیم مغز به مغز
بهروزرسانی در
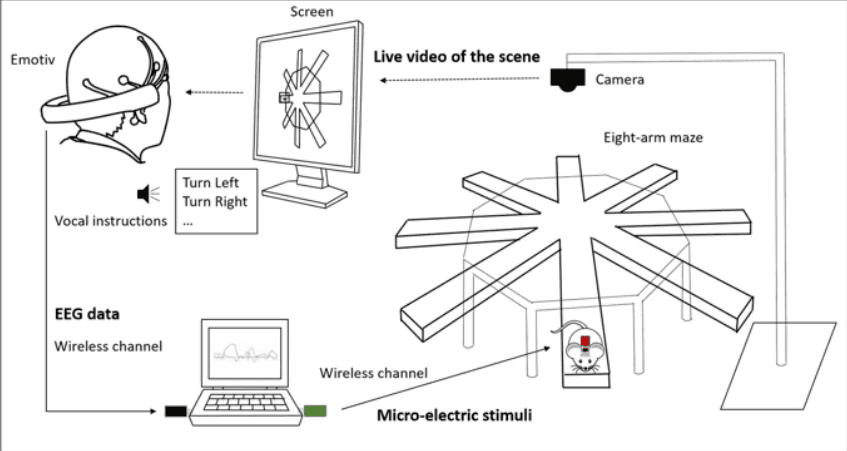
شائومین ژانگ، شنگ یوان، لیپنگ هوانگ، شیائوشیانگ ژنگ، ژائوهویی وو، کدی ژو و گانگ پانچکیدهرابطههای مغز-ماشین (BMIs) یک کانال اطلاعاتی امیدوارکننده بین مغز بیولوژیکی و دستگاههای خارجی فراهم میکنند و در建立 کنترل مغز به دستگاه کاربرد دارند. مطالعات قبلی امکانسنجی برقراری یک رابط مغز-مغز (BBI) بین مغزهای مختلف را از طریق ترکیب BMIs بررسی کردهاند. با این حال، استفاده از BBI برای تحقق کنترل چندجانبه مؤثر از یک موجود زنده، مانند یک موش، برای انجام یک وظیفه ناوبری در یک محیط پیچیده هنوز نشان داده نشده است. در این مطالعه، ما یک BBI از مغز انسان به یک موش کاشته شده با میکروالکترودها (یعنی سایبرگ موش) توسعه دادیم که ترکیبی از تخیل حرکتی مبتنی بر الکتروانسفالوگرام و تحریک مغزی را برای تحقق کنترل ذهن انسان بر روی حرکت مداوم موش یکپارچه کرد. دستورالعملهای کنترل از نتایج رمزگشایی تخیل حرکتی مداوم با مدلهای کنترلی پیشنهادی منتقل شده و به طور بیسیم به سایبرگ موش از طریق تحریک الکتریکی مغز ارسال شدند. نتایج نشان داد که سایبرگهای موش میتوانند به راحتی و موفقیتآمیز توسط ذهن انسان برای تکمیل یک وظیفه ناوبری در یک هزارتوی پیچیده هدایت شوند. آزمایشهای ما نشان داد که همکاری از طریق انتقال اطلاعات چندبعدی بین دو مغز با BBI مبتنی بر کامپیوتر امیدوارکننده است.دسترسی به مقاله در اینجا.
شائومین ژانگ، شنگ یوان، لیپنگ هوانگ، شیائوشیانگ ژنگ، ژائوهویی وو، کدی ژو و گانگ پانچکیدهرابطههای مغز-ماشین (BMIs) یک کانال اطلاعاتی امیدوارکننده بین مغز بیولوژیکی و دستگاههای خارجی فراهم میکنند و در建立 کنترل مغز به دستگاه کاربرد دارند. مطالعات قبلی امکانسنجی برقراری یک رابط مغز-مغز (BBI) بین مغزهای مختلف را از طریق ترکیب BMIs بررسی کردهاند. با این حال، استفاده از BBI برای تحقق کنترل چندجانبه مؤثر از یک موجود زنده، مانند یک موش، برای انجام یک وظیفه ناوبری در یک محیط پیچیده هنوز نشان داده نشده است. در این مطالعه، ما یک BBI از مغز انسان به یک موش کاشته شده با میکروالکترودها (یعنی سایبرگ موش) توسعه دادیم که ترکیبی از تخیل حرکتی مبتنی بر الکتروانسفالوگرام و تحریک مغزی را برای تحقق کنترل ذهن انسان بر روی حرکت مداوم موش یکپارچه کرد. دستورالعملهای کنترل از نتایج رمزگشایی تخیل حرکتی مداوم با مدلهای کنترلی پیشنهادی منتقل شده و به طور بیسیم به سایبرگ موش از طریق تحریک الکتریکی مغز ارسال شدند. نتایج نشان داد که سایبرگهای موش میتوانند به راحتی و موفقیتآمیز توسط ذهن انسان برای تکمیل یک وظیفه ناوبری در یک هزارتوی پیچیده هدایت شوند. آزمایشهای ما نشان داد که همکاری از طریق انتقال اطلاعات چندبعدی بین دو مغز با BBI مبتنی بر کامپیوتر امیدوارکننده است.دسترسی به مقاله در اینجا.
شائومین ژانگ، شنگ یوان، لیپنگ هوانگ، شیائوشیانگ ژنگ، ژائوهویی وو، کدی ژو و گانگ پانچکیدهرابطههای مغز-ماشین (BMIs) یک کانال اطلاعاتی امیدوارکننده بین مغز بیولوژیکی و دستگاههای خارجی فراهم میکنند و در建立 کنترل مغز به دستگاه کاربرد دارند. مطالعات قبلی امکانسنجی برقراری یک رابط مغز-مغز (BBI) بین مغزهای مختلف را از طریق ترکیب BMIs بررسی کردهاند. با این حال، استفاده از BBI برای تحقق کنترل چندجانبه مؤثر از یک موجود زنده، مانند یک موش، برای انجام یک وظیفه ناوبری در یک محیط پیچیده هنوز نشان داده نشده است. در این مطالعه، ما یک BBI از مغز انسان به یک موش کاشته شده با میکروالکترودها (یعنی سایبرگ موش) توسعه دادیم که ترکیبی از تخیل حرکتی مبتنی بر الکتروانسفالوگرام و تحریک مغزی را برای تحقق کنترل ذهن انسان بر روی حرکت مداوم موش یکپارچه کرد. دستورالعملهای کنترل از نتایج رمزگشایی تخیل حرکتی مداوم با مدلهای کنترلی پیشنهادی منتقل شده و به طور بیسیم به سایبرگ موش از طریق تحریک الکتریکی مغز ارسال شدند. نتایج نشان داد که سایبرگهای موش میتوانند به راحتی و موفقیتآمیز توسط ذهن انسان برای تکمیل یک وظیفه ناوبری در یک هزارتوی پیچیده هدایت شوند. آزمایشهای ما نشان داد که همکاری از طریق انتقال اطلاعات چندبعدی بین دو مغز با BBI مبتنی بر کامپیوتر امیدوارکننده است.دسترسی به مقاله در اینجا.
